

 Accident Uber : les capteurs du véhicule étaient fonctionnels, mais il y avait un problème logiciel
Accident Uber : les capteurs du véhicule étaient fonctionnels, mais il y avait un problème logicield'après l'enquête préliminaire du NTSB
Dimanche 18 mars 2018, un véhicule autonome d'Uber en plein essai a heurté un piéton sur l'avenue Mill, à Tempe, dans le comté de Maricopa en Arizona. Cela s'est produit alors qu'il y avait un opérateur à bord pour prendre le contrôle du véhicule en cas d'urgence. Comme conséquence, le piéton, une femme âgée de 49 ans avec une bicyclette, a perdu la vie suite à cet accident. Comme le montre l'image suivante, la défunte traversait l'avenue en question en venant du côté gauche du véhicule autonome d'Uber.

Le système de conduite autonome du véhicule se composait de caméras frontales et latérales, de radars, de LIDAR, de capteurs de navigation et d'une unité de calcul et de stockage de données intégrée au véhicule. Uber avait également équipé le véhicule d'un système de caméras montées sur le pare-brise et la vitre arrière, qui fournissaient des vidéos supplémentaires à l'avant et à l'arrière, ainsi qu'une vue vers l'intérieur de l'opérateur du véhicule. Au total, 10 vues de caméra ont été enregistrées pendant l'essai du véhicule autonome.
Bref, le véhicule d'Uber semblait bien équipé. Avec cela, comment l'accident a-t-il été possible ? C'est ce que beaucoup se sont demandé jusqu'ici. Certains experts ont même livré leurs propres analyses, en mettant en cause le plus souvent le système de conduite autonome d'Uber. L'une des hypothèses était une possible erreur dans le système de reconnaissance d'objets, qui aurait été incapable de classer Elaine Herzberg - la victime - et son vélo comme piéton. Si cela semblait improbable, il se trouve que ce n'est pas loin de la vérité. Le Conseil national américain de la sécurité des transports (National Transportation Safety Board ou NTSB) a en effet publié son rapport préliminaire sur l'accident mortel, et ce rapport incrimine la technologie de conduite autonome de l'entreprise de VTC.
Le système de conduite autonome repose sur une carte sous-jacente qui établit les limites de vitesse et les voies de circulation autorisées. Le système a deux modes de contrôle distincts : le contrôle par ordinateur et le contrôle manuel. C'est le premier qui était activé. L'opérateur peut passer du contrôle par ordinateur au contrôle manuel en fournissant une entrée au volant, à la pédale de frein, à la pédale d'accélérateur, à un bouton de débrayage ou à un bouton de désactivation. Selon Uber, son système autonome nécessite aussi un opérateur attentif pour intervenir s'il ne fonctionne pas correctement pendant les tests. L'opérateur est responsable de la surveillance des messages de diagnostic - qui apparaissent sur une interface dans la pile centrale du tableau de bord du véhicule - et du marquage des événements d'intérêt pour une révision ultérieure.
Selon les données obtenues du système de conduite autonome, les radars et le LIDAR ont permis d'identifier la victime environ 6 secondes avant l'impact, alors que le véhicule roulait à 43 mi/h, soit environ 69 km/h. Mais le véhicule d'Uber a plongé dans une confusion totale qui n'a pas permis à l'opérateur de prendre des mesures à temps. « Alors que les trajectoires du véhicule et du piéton convergeaient, le logiciel du système de conduite autonome a classé le piéton comme un objet inconnu, comme un véhicule, puis comme un vélo avec des attentes variables quant à sa future trajectoire », indique le rapport du NTSB. Mais « à 1,3 seconde avant l'impact, le système de conduite autonome a déterminé qu'une manuvre de freinage d'urgence était nécessaire pour atténuer une collision ». Toutefois, là encore, un autre problème se pose : le système ne peut ni entreprendre de manuvre de freinage d'urgence ni alerter l'opérateur. « Selon Uber, les manuvres de freinage d'urgence ne sont pas activées lorsque le véhicule est contrôlé par ordinateur, afin de réduire le risque de comportement erratique du véhicule. Il compte sur l'opérateur du véhicule pour intervenir et agir », mais « le système n'est pas conçu pour alerter l'opérateur », rapporte le NTSB.
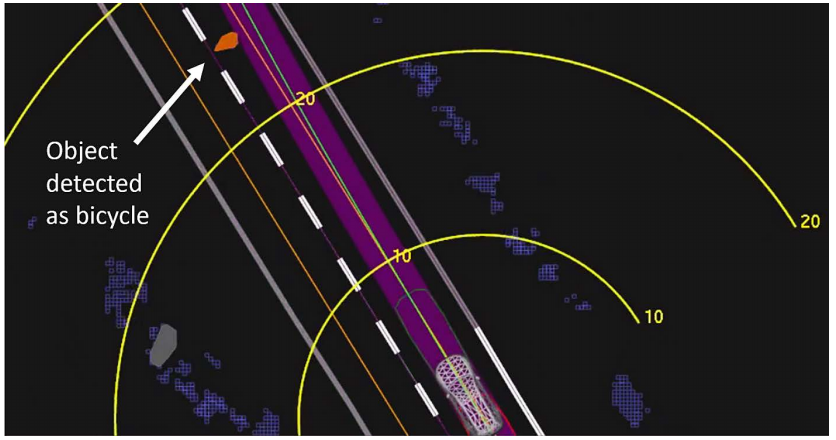
L'image ci-dessous montre la lecture des données du système de conduite autonome environ 1,3 seconde avant l'impact, lorsque le système a déterminé qu'une manuvre de freinage d'urgence était nécessaire pour atténuer une collision. Les bandes jaunes sont séparées de 10 mètres, ce qui indique qu'à 1,3 seconde avant l'impact, le véhicule était éloigné de 20 à 30 mètres de la victime. Les lignes orange indiquent le centre des voies de circulation cartographiées. Donc la victime était un peu excentrée. La zone ombrée pourpre indique le trajet parcouru par le véhicule, la ligne verte indiquant le centre de ce trajet.
« Les données du système de conduite autonome ont montré que l'opérateur du véhicule est intervenu moins d'une seconde avant l'impact en engageant le volant. La vitesse du véhicule à l'impact était de 39 mi/h [soit environ 63 km/h]. L'opérateur a commencé à freiner moins d'une seconde après l'impact. Les données ont également montré que tous les aspects du système de conduite autonome fonctionnaient normalement au moment de l'accident, et qu'il n'y avait pas de messages de diagnostic ou de pannes », peut-on lire dans le rapport.
Le véhicule a pourtant été équipé en usine de plusieurs fonctions avancées d'assistance au conducteur par Volvo Cars, le fabricant d'origine. Les systèmes comprenaient une fonction d'évitement des collisions avec freinage d'urgence automatique, connue sous le nom de City Safety, ainsi que des fonctions de détection de la vigilance du conducteur et des informations sur les panneaux de signalisation. Mais toutes ces fonctions Volvo sont désactivées lorsque le véhicule d'essai est contrôlé par ordinateur.
Le NTSB continue de recueillir des informations sur le système de conduite autonome dUber, l'interface du véhicule et les téléphones cellulaires personnels et professionnels du conducteur. Bien que des tests de toxicologie n'aient pas été menés sur le conducteur du véhicule, les agents du service de police de Tempe interrogés ont déclaré que le conducteur du véhicule ne présentait aucun signe de déficience au moment de l'accident. Ce n'était toutefois pas le cas pour la victime pour laquelle les résultats des tests de toxicologie étaient positifs pour la méthamphétamine et la marijuana. Tous les aspects de l'accident font encore l'objet d'investigation par le NTSB, dans le but démettre des recommandations de sécurité pour prévenir des accidents similaires. Un compte rendu complet sur l'accident sera livré ultérieurement.
Source : Rapport du NTSB
Et vous ?
 De ce que vous lisez du rapport du NTSB, qui ou que faut-il incriminer ? Uber a-t-il fait un mauvais choix en désactivant la manoeuvre de freinage d'urgence en mode automatique ? Cela vous inspire-t-il des craintes par rapport au projet de la France d'autoriser les voitures autonomes dès 2020 ? Pourquoi ?
De ce que vous lisez du rapport du NTSB, qui ou que faut-il incriminer ? Uber a-t-il fait un mauvais choix en désactivant la manoeuvre de freinage d'urgence en mode automatique ? Cela vous inspire-t-il des craintes par rapport au projet de la France d'autoriser les voitures autonomes dès 2020 ? Pourquoi ?Voir aussi :
Uber arrête définitivement son activité de voiture autonome en Arizona après l'accident mortel de mars, et amorce une procédure de licenciements Les Américains font moins confiance aux véhicules autonomes suite aux accidents mortels essuyés par Uber et Tesla, d'après des sondages La France envisage d'autoriser les voitures autonomes dès 2020, la technologie sera-t-elle suffisamment éprouvée pour franchir ce cap dans deux ans ? Le véhicule autonome d'Uber impliqué dans l'accident mortel aurait vu sa victime, mais l'a ignorée, à cause d'une défaillance de son système Voiture autonome : des rapports adressés au DMV californien donnent un état des lieux des circonstances entraînant le retour au mode manuel
Vous avez lu gratuitement 8 011 articles depuis plus d'un an.
Soutenez le club developpez.com en souscrivant un abonnement pour que nous puissions continuer à vous proposer des publications.
Soutenez le club developpez.com en souscrivant un abonnement pour que nous puissions continuer à vous proposer des publications.




 pardon j'ai pas pu m'empêcher
pardon j'ai pas pu m'empêcher 